About Me

Right now, I'm developing laser-based positioning systems that help heavy equipment stay aligned with design models on the job site. My work focuses on the control of road work and construction site machines using laser positioning and GNSS systems, keeping them on grade and on line in real time. It's not full autonomous driving, but it's about bringing automation and accuracy to machines that shape real infrastructure. I enjoy working in Agile/Scrum teams, where software, hardware, and mechanical experts all come together.
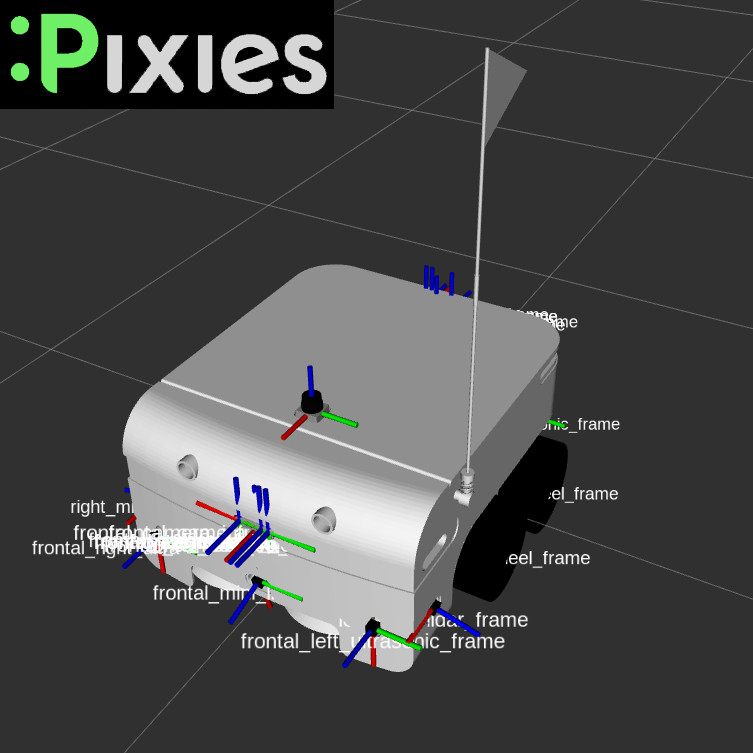
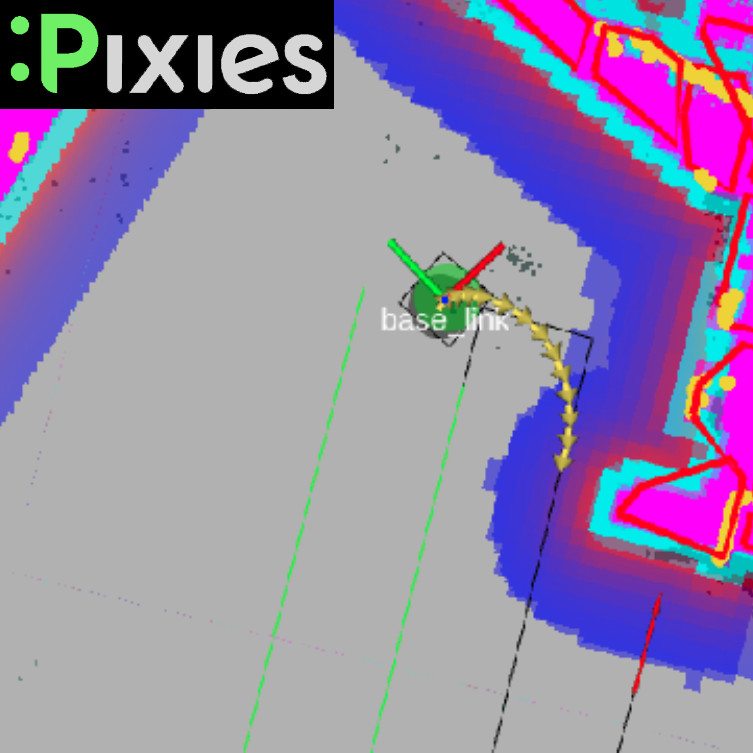
Before that, I studied Artificial Intelligence and Robotics in Rome, where I am from. That's where I built my foundation in robot kinematics, motion control, computer vision, and deep learning — and my bachelor thesis on mobile robot navigation pushed me toward robotics in the first place.
What excites me most is combining hands-on machine control experience with my robotics background to push forward R&D in autonomous construction equipment, intelligent positioning, and advanced automation systems.